Output.hpp File Reference
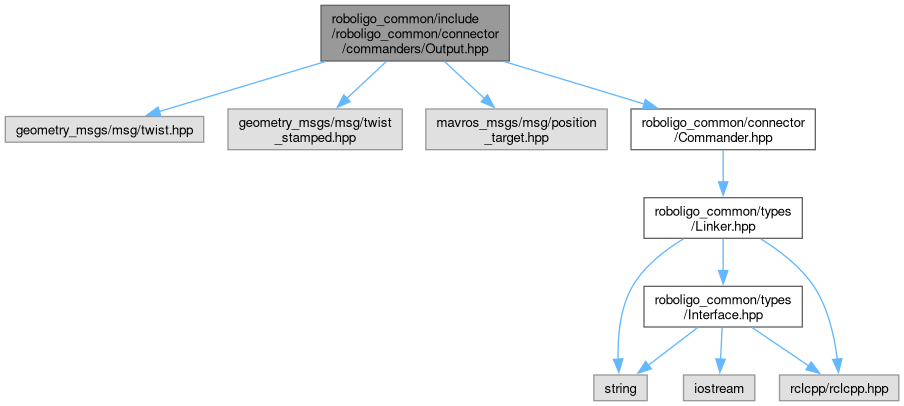
#include <geometry_msgs/msg/twist.hpp>#include <geometry_msgs/msg/twist_stamped.hpp>#include <mavros_msgs/msg/position_target.hpp>#include "roboligo_common/connector/Commander.hpp"
Include dependency graph for Output.hpp:
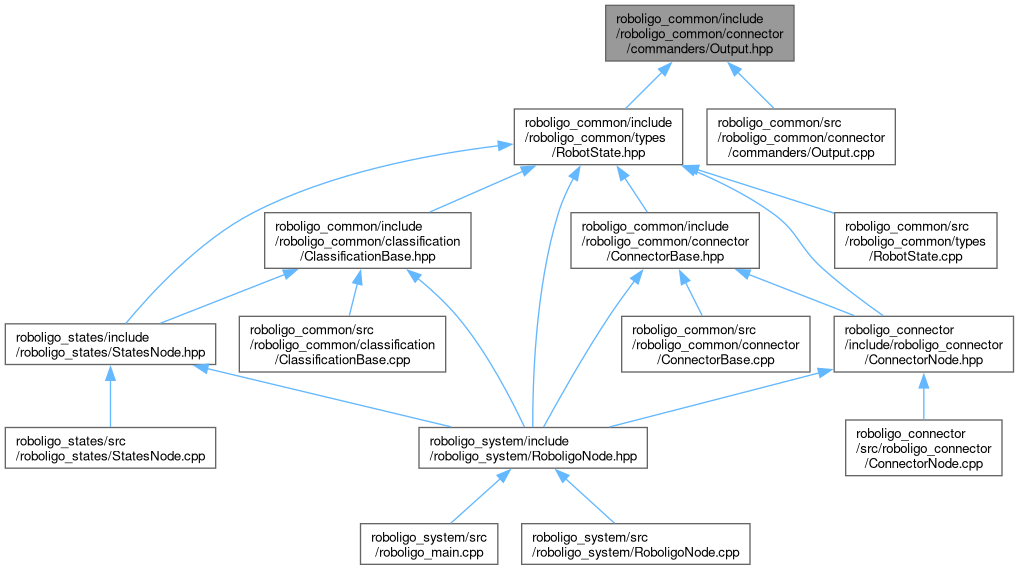
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | roboligo::Output |
| Handles output commands for robot motion control. More... | |
| struct | roboligo::RoboligoOutputPositionTarget |
| Encapsulates a ROS 2 publisher and message data for position target commands with control parameters. More... | |
| struct | roboligo::RoboligoOutputTwist |
| Encapsulates a ROS 2 publisher and message data for Twist commands. More... | |
| struct | roboligo::RoboligoOutputTwistStamped |
| Encapsulates a ROS 2 publisher and message data for stamped Twist commands. More... | |
Namespaces | |
| namespace | roboligo |
Generated by