roboligo::RobotState Class Reference
Represents the state and configuration of a robot. More...
#include <RobotState.hpp>
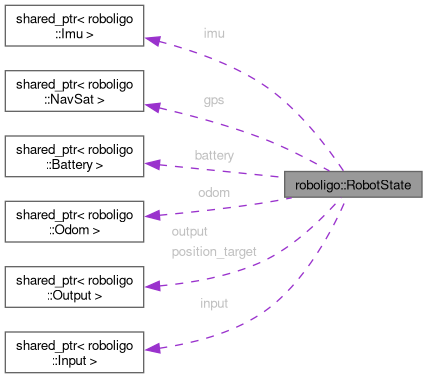
Collaboration diagram for roboligo::RobotState:
Public Member Functions | |
| Mode * | get_mode (const std::string &mode_name) |
| Retrieves a mode by name. | |
| std::vector< Mode > | get_modes (void) |
| Gets all available modes. | |
| std::string | get_name (void) |
| Gets the robot name. | |
| Trigger * | get_trigger (const std::string &trigger_name) |
| Retrieves a trigger by name. | |
| std::vector< Trigger > | get_triggers (void) |
| Gets all available triggers. | |
| bool | is_available (void) |
| Checks if the robot is available. | |
| bool | is_simulation (void) |
| Checks if the robot is in simulation mode. | |
| bool | is_stamped (void) |
| Checks if the robot uses time stamping. | |
| RobotState ()=default | |
| Default constructor. | |
| void | set_available (bool new_state) |
| Sets the robot availability status. | |
| void | set_modes (std::vector< Mode > modes) |
| Sets the available operational modes. | |
| void | set_name (std::string new_name) |
| Sets the robot name. | |
| void | set_simulation (bool new_state) |
| Sets the simulation mode status. | |
| void | set_stamp (bool new_state) |
| Enables or disables time stamping. | |
| void | set_triggers (std::vector< Trigger > triggers) |
| Sets the available triggers. | |
| void | show (void) |
| Displays complete robot state information. | |
| std::string | show_modes (void) |
| Returns a string representation of all modes. | |
| std::string | show_triggers (void) |
| Returns a string representation of all triggers. | |
| virtual | ~RobotState ()=default |
| Virtual destructor. | |
Public Attributes | |
| std::shared_ptr< roboligo::Battery > | battery |
| Battery status monitor component. | |
| std::shared_ptr< roboligo::NavSat > | gps |
| Global Navigation Satellite System (GPS) sensor. | |
| std::shared_ptr< roboligo::Imu > | imu |
| Inertial Measurement Unit sensor component. | |
| std::shared_ptr< roboligo::Input > | input |
| Input sensor component. | |
| std::shared_ptr< roboligo::Odom > | odom |
| Odometry sensor component. | |
| std::shared_ptr< roboligo::Output > | output |
| Output actuator component. | |
| std::shared_ptr< roboligo::Output > | position_target |
| Position target output component. | |
Detailed Description
Represents the state and configuration of a robot.
This class manages robot properties including name, operational modes, triggers, and various sensor/actuator components. It tracks availability, simulation status, and time-stamping capabilities.
Constructor & Destructor Documentation
◆ RobotState()
|
default |
Default constructor.
◆ ~RobotState()
|
virtualdefault |
Virtual destructor.
Member Function Documentation
◆ get_mode()
| Mode * roboligo::RobotState::get_mode | ( | const std::string & | mode_name | ) |
Retrieves a mode by name.
- Parameters
-
mode_name The name of the mode to find.
- Returns
- Pointer to the Mode object, or nullptr if not found.
◆ get_modes()
| std::vector< Mode > roboligo::RobotState::get_modes | ( | void | ) |
Gets all available modes.
- Returns
- Vector of Mode objects.
◆ get_name()
| std::string roboligo::RobotState::get_name | ( | void | ) |
Gets the robot name.
- Returns
- The robot's name as a string.
◆ get_trigger()
| Trigger * roboligo::RobotState::get_trigger | ( | const std::string & | trigger_name | ) |
Retrieves a trigger by name.
- Parameters
-
trigger_name The name of the trigger to find.
- Returns
- Pointer to the Trigger object, or nullptr if not found.
◆ get_triggers()
| std::vector< Trigger > roboligo::RobotState::get_triggers | ( | void | ) |
Gets all available triggers.
- Returns
- Vector of Trigger objects.
◆ is_available()
| bool roboligo::RobotState::is_available | ( | void | ) |
Checks if the robot is available.
- Returns
- true if available, false otherwise.
◆ is_simulation()
| bool roboligo::RobotState::is_simulation | ( | void | ) |
Checks if the robot is in simulation mode.
- Returns
- true if in simulation, false otherwise.
◆ is_stamped()
| bool roboligo::RobotState::is_stamped | ( | void | ) |
Checks if the robot uses time stamping.
- Returns
- true if stamped, false otherwise.
◆ set_available()
| void roboligo::RobotState::set_available | ( | bool | new_state | ) |
Sets the robot availability status.
- Parameters
-
new_state true to mark as available, false otherwise.
◆ set_modes()
| void roboligo::RobotState::set_modes | ( | std::vector< Mode > | modes | ) |
Sets the available operational modes.
- Parameters
-
modes Vector of Mode objects.
◆ set_name()
| void roboligo::RobotState::set_name | ( | std::string | new_name | ) |
Sets the robot name.
- Parameters
-
new_name The new name to assign.
◆ set_simulation()
| void roboligo::RobotState::set_simulation | ( | bool | new_state | ) |
Sets the simulation mode status.
- Parameters
-
new_state true to enable simulation mode.
◆ set_stamp()
| void roboligo::RobotState::set_stamp | ( | bool | new_state | ) |
Enables or disables time stamping.
- Parameters
-
new_state true to enable stamping.
◆ set_triggers()
| void roboligo::RobotState::set_triggers | ( | std::vector< Trigger > | triggers | ) |
Sets the available triggers.
- Parameters
-
triggers Vector of Trigger objects.
◆ show()
| void roboligo::RobotState::show | ( | void | ) |
Displays complete robot state information.
◆ show_modes()
| std::string roboligo::RobotState::show_modes | ( | void | ) |
Returns a string representation of all modes.
- Returns
- Formatted string containing mode information.
◆ show_triggers()
| std::string roboligo::RobotState::show_triggers | ( | void | ) |
Returns a string representation of all triggers.
- Returns
- Formatted string containing trigger information.
Member Data Documentation
◆ battery
| std::shared_ptr<roboligo::Battery> roboligo::RobotState::battery |
Initial value:
= std::make_shared<roboligo::Battery>(
"battery", "battery_topic")
Battery status monitor component.
◆ gps
| std::shared_ptr<roboligo::NavSat> roboligo::RobotState::gps |
Initial value:
= std::make_shared<roboligo::NavSat>(
"gps", "gps_topic")
Global Navigation Satellite System (GPS) sensor.
◆ imu
| std::shared_ptr<roboligo::Imu> roboligo::RobotState::imu |
Initial value:
= std::make_shared<roboligo::Imu>(
"imu", "imu_topic")
Inertial Measurement Unit sensor component.
◆ input
| std::shared_ptr<roboligo::Input> roboligo::RobotState::input |
Initial value:
= std::make_shared<roboligo::Input>(
"input", "input_topic")
Input sensor component.
◆ odom
| std::shared_ptr<roboligo::Odom> roboligo::RobotState::odom |
Initial value:
= std::make_shared<roboligo::Odom>(
"odom", "odom_topic")
Odometry sensor component.
◆ output
| std::shared_ptr<roboligo::Output> roboligo::RobotState::output |
Initial value:
= std::make_shared<roboligo::Output>(
"output", "output_topic")
Output actuator component.
◆ position_target
| std::shared_ptr<roboligo::Output> roboligo::RobotState::position_target |
Initial value:
= std::make_shared<roboligo::Output>(
"position_target", "output_topic")
Position target output component.
The documentation for this class was generated from the following files:
- roboligo_common/include/roboligo_common/types/RobotState.hpp
- roboligo_common/src/roboligo_common/types/RobotState.cpp
Generated by