roboligo::Input Class Reference
Commander that subscribes to and processes Twist messages. More...
#include <Input.hpp>
Inheritance diagram for roboligo::Input:
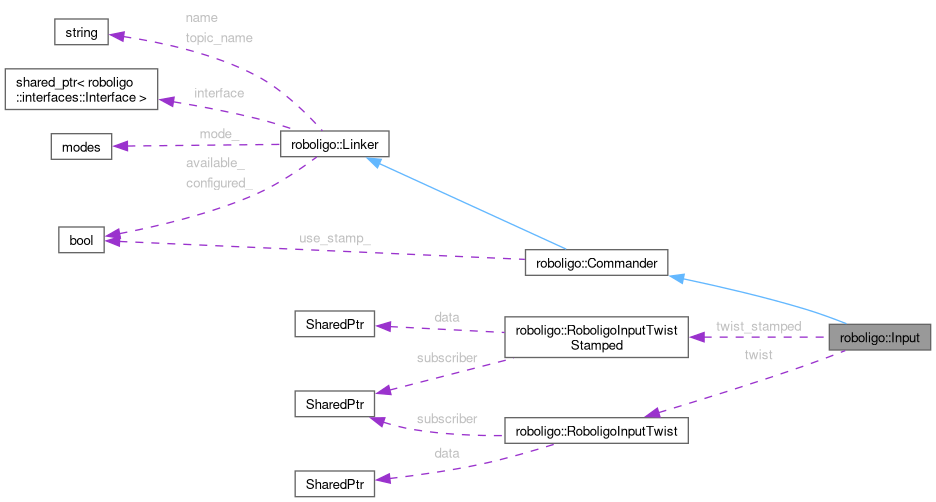
Collaboration diagram for roboligo::Input:
Public Member Functions | |
| void | callback (const geometry_msgs::msg::Twist::SharedPtr msg) |
| Callback handler for Twist messages. | |
| void | callback_stamped (const geometry_msgs::msg::TwistStamped::SharedPtr msg) |
| Callback handler for TwistStamped messages. | |
| Input (std::string new_name, std::string new_topic) | |
| Constructor. | |
| virtual | ~Input ()=default |
| Destructor. | |
| Public Member Functions inherited from roboligo::Commander | |
| Commander (std::string new_name, std::string new_value) | |
| Constructor for Commander. | |
| void | init (std::string new_name, std::string new_value) |
| Initialize the commander with name and value. | |
| bool | is_stamped (void) |
| Check if timestamp stamping is enabled. | |
| void | set_stamp (bool stamped) |
| Enable or disable timestamp stamping for messages. | |
| virtual | ~Commander ()=default |
| Virtual destructor. | |
| Public Member Functions inherited from roboligo::Linker | |
| interfaces::modes | get_mode () |
| Gets the current mode of the linker. | |
| std::string | get_name () |
| Gets the linker name. | |
| std::string | get_topic () |
| Gets the topic name. | |
| bool | is_available (void) |
| Checks if the linker is available. | |
| bool | is_configured (void) |
| Checks if the linker is configured. | |
| Linker () | |
| Default constructor. | |
| void | set_available (bool new_state) |
| Sets the availability state. | |
| void | set_configured (bool new_state) |
| Sets the configuration state. | |
| void | set_interface (std::string name_, std::string topic_name_) |
| Configures the interface with name and topic. | |
| void | set_mode (interfaces::modes new_mode) |
| Sets the linker mode. | |
| void | set_name (std::string new_name) |
| Sets the linker name. | |
| void | set_service (std::string new_name) |
| Sets the service name. | |
| void | set_topic (std::string new_name) |
| Sets the topic name. | |
| virtual | ~Linker ()=default |
| Virtual destructor. | |
Public Attributes | |
| RoboligoInputTwist | twist |
| RoboligoInputTwist element. | |
| RoboligoInputTwistStamped | twist_stamped |
| RoboligoInputTwistStamped element. | |
| Public Attributes inherited from roboligo::Linker | |
| std::shared_ptr< interfaces::Interface > | interface |
| Shared pointer to the interface object. | |
| std::string | name {"linker"} |
| Linker identifier name. | |
| std::string | topic_name {"/interface"} |
| Associated topic name. | |
Additional Inherited Members | |
| Protected Member Functions inherited from roboligo::Commander | |
| void | initialize (std::string new_name, std::string new_topic) |
| Protected initialization method. | |
| Protected Attributes inherited from roboligo::Commander | |
| bool | use_stamp_ {true} |
| Flag indicating whether to include timestamps in published messages. | |
| Protected Attributes inherited from roboligo::Linker | |
| bool | available_ {false} |
| Availability flag. | |
| bool | configured_ {false} |
| Configuration state flag. | |
| interfaces::modes | mode_ |
| Current operating mode. | |
Detailed Description
Commander that subscribes to and processes Twist messages.
Manages subscriptions to both Twist and TwistStamped message topics, storing the received data and providing callback handlers for message processing.
- Parameters
-
new_name The name identifier for this input commander. new_topic The ROS 2 topic to subscribe to.
Constructor & Destructor Documentation
◆ Input()
| roboligo::Input::Input | ( | std::string | new_name, |
| std::string | new_topic ) |
Constructor.
◆ ~Input()
|
virtualdefault |
Destructor.
Member Function Documentation
◆ callback()
| void roboligo::Input::callback | ( | const geometry_msgs::msg::Twist::SharedPtr | msg | ) |
Callback handler for Twist messages.
- Parameters
-
msg Shared pointer to the received Twist message.
◆ callback_stamped()
| void roboligo::Input::callback_stamped | ( | const geometry_msgs::msg::TwistStamped::SharedPtr | msg | ) |
Callback handler for TwistStamped messages.
- Parameters
-
msg Shared pointer to the received TwistStamped message.
Member Data Documentation
◆ twist
| RoboligoInputTwist roboligo::Input::twist |
RoboligoInputTwist element.
◆ twist_stamped
| RoboligoInputTwistStamped roboligo::Input::twist_stamped |
RoboligoInputTwistStamped element.
The documentation for this class was generated from the following files:
Generated by