roboligo::Sensor Class Reference
A sensor class that extends Linker functionality for subscribing to sensor data. More...
#include <Sensor.hpp>
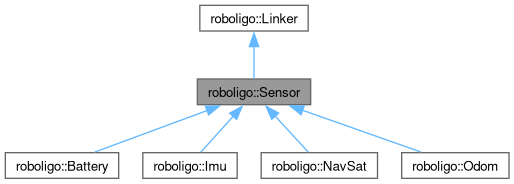
Inheritance diagram for roboligo::Sensor:
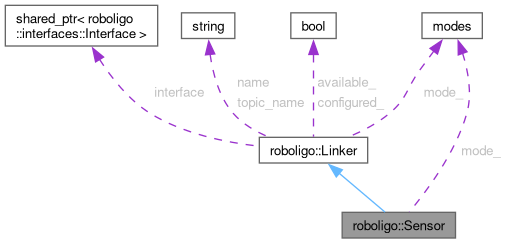
Collaboration diagram for roboligo::Sensor:
Public Member Functions | |
| void | init (std::string new_name, std::string new_topic) |
| Initializes the sensor with a name and topic. | |
| Sensor (std::string new_name, std::string new_topic) | |
| Constructor for Sensor. | |
| virtual | ~Sensor ()=default |
| Virtual destructor. | |
| Public Member Functions inherited from roboligo::Linker | |
| interfaces::modes | get_mode () |
| Gets the current mode of the linker. | |
| std::string | get_name () |
| Gets the linker name. | |
| std::string | get_topic () |
| Gets the topic name. | |
| bool | is_available (void) |
| Checks if the linker is available. | |
| bool | is_configured (void) |
| Checks if the linker is configured. | |
| Linker () | |
| Default constructor. | |
| void | set_available (bool new_state) |
| Sets the availability state. | |
| void | set_configured (bool new_state) |
| Sets the configuration state. | |
| void | set_interface (std::string name_, std::string topic_name_) |
| Configures the interface with name and topic. | |
| void | set_mode (interfaces::modes new_mode) |
| Sets the linker mode. | |
| void | set_name (std::string new_name) |
| Sets the linker name. | |
| void | set_service (std::string new_name) |
| Sets the service name. | |
| void | set_topic (std::string new_name) |
| Sets the topic name. | |
| virtual | ~Linker ()=default |
| Virtual destructor. | |
Protected Member Functions | |
| void | initialize (std::string new_name, std::string new_topic) |
| Protected initialization method. | |
Protected Attributes | |
| interfaces::modes | mode_ {interfaces::modes::SUBSCRIBER} |
| The connection mode set to SUBSCRIBER for receiving sensor data. | |
| Protected Attributes inherited from roboligo::Linker | |
| bool | available_ {false} |
| Availability flag. | |
| bool | configured_ {false} |
| Configuration state flag. | |
| interfaces::modes | mode_ |
| Current operating mode. | |
Additional Inherited Members | |
| Public Attributes inherited from roboligo::Linker | |
| std::shared_ptr< interfaces::Interface > | interface |
| Shared pointer to the interface object. | |
| std::string | name {"linker"} |
| Linker identifier name. | |
| std::string | topic_name {"/interface"} |
| Associated topic name. | |
Detailed Description
A sensor class that extends Linker functionality for subscribing to sensor data.
This class provides the base implementation for sensor connections in the roboligo system. It handles subscription to sensor topics and manages sensor-specific initialization.
Constructor & Destructor Documentation
◆ Sensor()
| roboligo::Sensor::Sensor | ( | std::string | new_name, |
| std::string | new_topic ) |
Constructor for Sensor.
- Parameters
-
new_name The name identifier for the sensor. new_topic The ROS topic name to subscribe to.
◆ ~Sensor()
|
virtualdefault |
Virtual destructor.
Member Function Documentation
◆ init()
| void roboligo::Sensor::init | ( | std::string | new_name, |
| std::string | new_topic ) |
Initializes the sensor with a name and topic.
- Parameters
-
new_name The name identifier for the sensor. new_topic The ROS topic name to subscribe to.
◆ initialize()
|
protected |
Protected initialization method.
- Parameters
-
new_name The name identifier for the sensor. new_topic The ROS topic name to subscribe to.
Member Data Documentation
◆ mode_
|
protected |
The connection mode set to SUBSCRIBER for receiving sensor data.
The documentation for this class was generated from the following files:
- roboligo_common/include/roboligo_common/connector/Sensor.hpp
- roboligo_common/src/roboligo_common/connector/Sensor.cpp
Generated by